

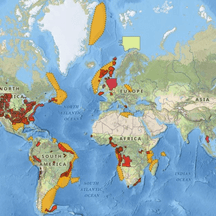
CGG has recently commenced a commercial worldwide natural hydrogen screening project.
Added: 2 weeks ago
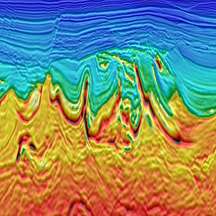
CGG's unmatched 3D seismic images and models of subsurface geology rely on our innovative geoscience technologies and HPC, plus something equally as important – the technical excellence of our...
Added: 9th February 2024
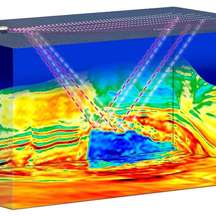
Much of the world’s oil & gas is found offshore and is often several kilometres beneath the seabed.
Added: 21st December 2023
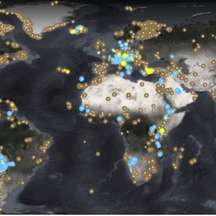
CGG is pleased to announce the opening of its new UK HPC (High-Performance Computing) Hub in Southeast England.
Added: 2nd November 2023
CGG has entered into an agreement with Carbon Transition to reimage the Utsira ocean bottom node (OBN) seismic survey in the Norwegian North Sea.
Added: Over a year ago
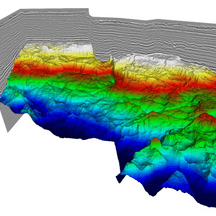
CGG is working on a new multi-client data project in Southeast Arizona focusing on exploration and development in the mining industry.
Added: Over a year ago

CGG and bp have signed a major multi-year global data transformation and curation agreement, that will play a key role in supporting bp’s subsurface digital strategy.
Added: Over a year ago

CGG’s Minerals & Mining team has been awarded a contract by DLE Resources to assess the regional potential for lithium and potash mineralization in Argentina.
Added: Over a year ago

CGG uses a one-way on-demand video interview as part of the application process. Although we are far from the only company which use them we appreciate that many people find the format a little...
Added: Over a year ago
CGG has released a new Lithium Brine Screening study to support the search for new sources of this critical energy transition element.
Added: Over a year ago
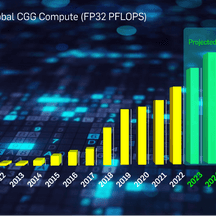
CGG is significantly expanding its high-performance computing (HPC) capacity to support both the continued advance of our industry-leading subsurface imaging technology and services, as well as the...
Added: Over a year ago




